
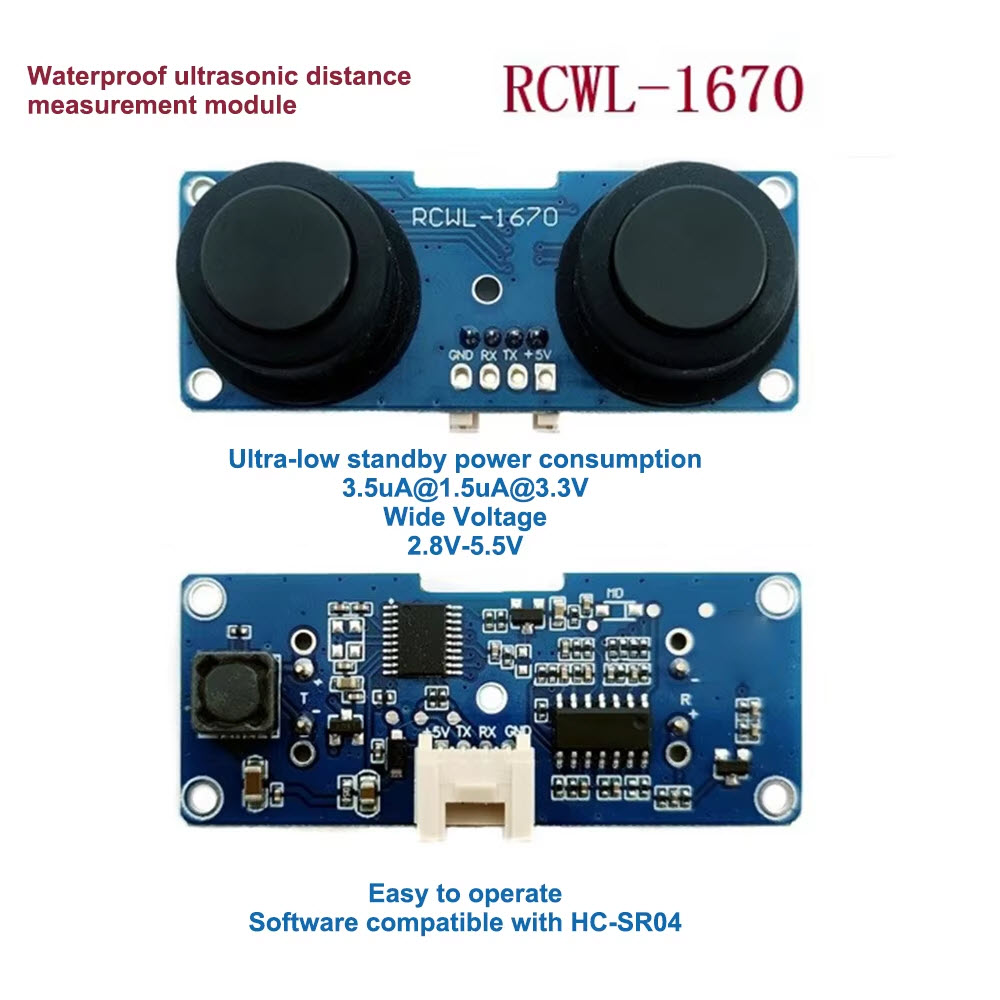
RCWL-1670 Ultrasonic Ranging Module Waterproof Transceiver Split HC-SR04 HC SR04 HCSR04 Distance Sensor For Arduino (Trig-Echo) ,UART(TX-RX)


| รหัสสินค้า | M4538 |
| หมวดหมู่ | วัดระยะทาง และ ความเคลื่อนใหว |
| ราคา | 200.00 บาท |
| น้ำหนัก | 10 กรัม |
| สถานะสินค้า | พร้อมส่ง |
| ลงสินค้า | 1 พ.ย. 2567 |
| อัพเดทล่าสุด | 28 ส.ค. 2568 |
| จำนวน | pcs |

รายละเอียดสินค้า
-
DC3-5V RCWL-1670 Ultrasonic Ranging Module Waterproof Transceiver Split Ultrasonic Detector Ranging Module HC-SR04 HC SR04 HCSR04 Ultrasonic Distance Sensor For Arduino
Product selling points:
1. High quality materials with guaranteed quality
2. Typical applications: outdoor robot obstacle avoidance, liquid level, water level measurement, trash can detection, other ranging applications, etc
3. The module has waterproof and dust-proof functions, and is suitable for wet and harsh measurement occasions
4. The module has ultra-low standby power consumption, which is suitable for battery applications.
5. RCWL-1670 is a waterproof, transceiver split ultrasonic ranging module
Product parameters:
Working voltage: 3-5 V
Working current: 6mA
Standby current: 3.5uA@5V 1.5uA@3.3V
Software compatible with HC-SR04
2CM blind area, 4M typical farthest ranging
50mS measurement cycle
Product overview:
RCWL-1670 is a waterproof, transceiver split ultrasonic ranging module. 2cm-400cm ranging range, 3-5 V wide voltage operation, 1.5uA@3.3V / 3.5uA@5V Ultra low standby power consumption. The module includes a transmitter receiver split waterproof ultrasonic sensor and a control circuit. The external control software is compatible with the HC-SR04 module.
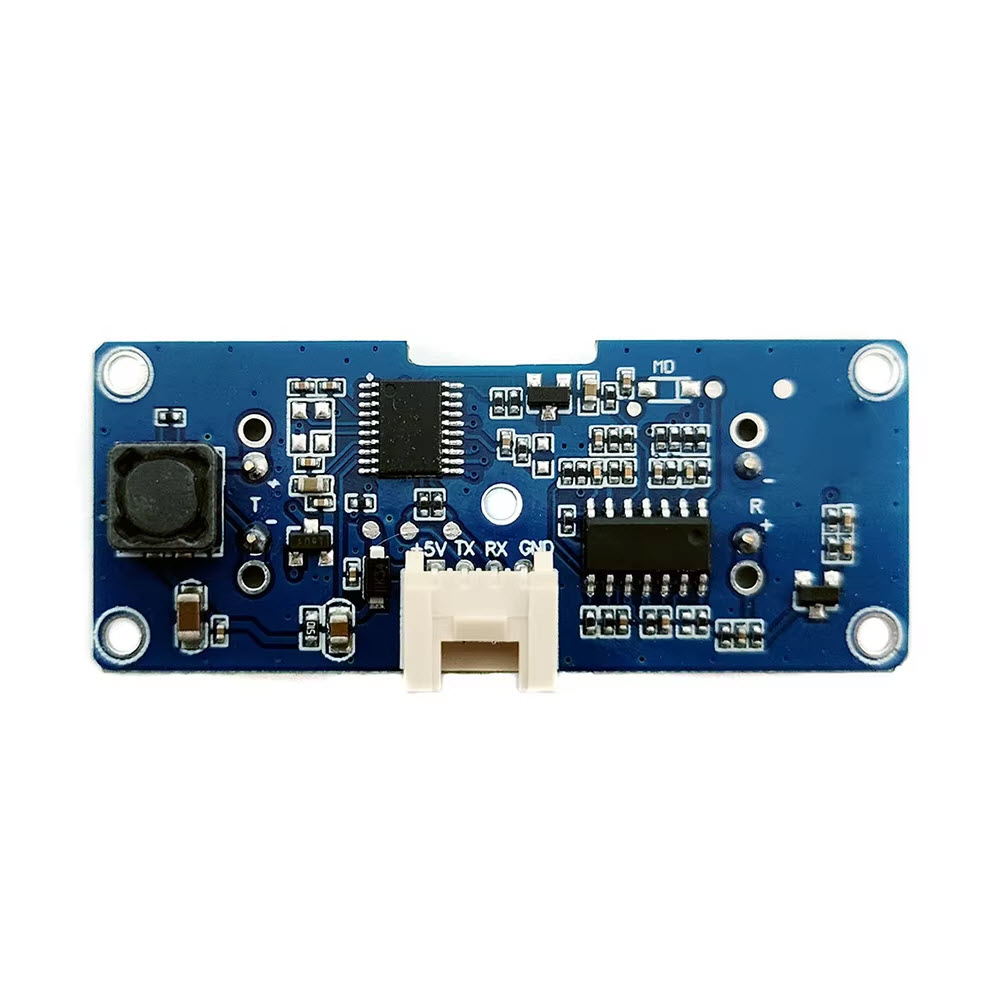
Pin description:
Label 5V: 3-5V power supply
Label TX: ECHO return distance signal
Label RX: TRIG trigger signal
Label GND: ground
matters needing attention:
1: This module should not be connected with electricity. If it is necessary to connect with electricity, let the Gnd end of the module connect first.
2: If the test surface is not very regular or when testing remote objects, multiple measurements can be used to correct.
3: The interval between two tests shall not be less than 50mS.
/* HC-SR04 Sensor
/*
Module: RCWL-9300A 16MM Split Type Open Type Ultrasonic Ranging Module
Version: V2.0
Date: 20220710
Master chip: RCWL-9300A
Function: In GPIO mode, RCWL-9610 ultrasonic ranging module measures distance and displays it on the serial port
Notice: Module default GPIO mode
Write: Wuxi Richen IoT Technology Co., Ltd.
Test board: RCWL-3310
Program customization: 13915288564
Connection :
-VCC = 3.3V/5.5V
-Trig_RX_SCL = A5
-Echo_TX_SDA = A4
-GND = GND
*/
float distance;
const int echo=A4; // echo to A4 pin
const int trig=A5; // trig connected to pin A5
void setup()
{
Serial.begin(9600); //Baud rate 9600
pinMode(echo,INPUT); //Set echo as input pin
pinMode(trig,OUTPUT); //Set trig as output pin
Serial.println("RCWL-9610-GPIO Ranging start:");
}
void loop()
{
digitalWrite(trig,HIGH);
delayMicroseconds(500);
digitalWrite(trig,LOW); // Trig pin outputs 10US high level pulse trigger signal
distance = pulseIn(echo,HIGH); // Count the received high time
distance = distance*340/2/10000; // Calculation distance
// 1: speed of sound: 340M/S
// 2: actual distance is 1/2 speed of sound distance
// 3: counting clock is 1uS
// temperature compensation formula:
// c=(331.45+0.61t/℃)ms-1 (where 331.45 is at 0 Spend)
Serial.print("distance: ");
Serial.print(distance); // Serial port output distance signal
Serial.print("CM");
Serial.println(""); // new line
delay(20); // After a single measurement is completed,
// add a 30mS delay before the next measurement.
// To prevent the aftermath of the last measurement
// When measuring at close range, resulting in inaccurate measurement.
delay(100); // Delay 200mS to measure again, delay is not necessary
}
*
*
*
*
//----------- I2C (SDA, SCL) R4 = 10K --------------
/*
module: RCWL-9300A 16MM Split Type Open Type Ultrasonic Ranging Module
Version: V2.0
date: 20220710
Master chip: RCWL-9300A
Function: RCWL-9300A ultrasonic distance measuring module distance measurement and serial port display in IIC mode
Notice: Need to set the module in IIC mode
test board: RCWL-3310
write: Wuxi Richen IoT Technology Co., Ltd.
Program customization: 13915288564
I2C data format: The IIC of RCWL-9300A outputs three 8BIT data, and the distance MM
value = 24-bit data is converted into decimal/10000.
connection :
-VCC = 3.3V/5.5V
-Trig_RX_SCL = A5
-Echo_TX_SDA = A4
-GND = GND
*/
#include "SoftwareSerial.h"
#include "Wire.h"
float distance = 0; // Distance data decimal value
float ds[3]; // [3] 8BIT distance data
void setup()
{
Serial.begin(9600); //Define serial port baud rate 9600 Factory default baud rate 9600
Wire.begin();
Serial.println("RCWL-9300A ranging start:");
}
void loop()
{
char i = 0;
ds[0]=0;
ds[1]=0;
ds[2]=0; // Initialize three 8BIT distance data as 0
Wire.beginTransmission(0x57); // The address is 0X57, write 8-bit data as AE, and read 8-bit data as AF
Wire.write(1); // Write command 0X01, 0X01 is the start measurement command
Wire.endTransmission(); // I2C end command
delay(150); //Measurement cycle delay, one cycle is 120mS, set 150MS, leave a margin
Wire.requestFrom(0x57,3); //The address is 0X57 to read three 8-bit distance data
while (Wire.available())
{
ds[i++] = Wire.read();
}
distance=(ds[0]*65536+ds[1]*256+ds[2])/10000; //Calculated as CM value
Serial.print("distance:");
if ((1<=distance)&&(distance<=900)) // Numerical display between 1CM-9M
{
#if 0
Serial.println();
Serial.print(ds[0]);
Serial.println();
Serial.print(ds[1]);
Serial.println();
Serial.print(ds[2]);
Serial.println();
#endif //#if 1, output 3 distance data of I2C
Serial.print(distance);
Serial.print(" CM ");
}
else
{
Serial.println();
Serial.print(ds[0]);
Serial.println();
Serial.print(ds[1]);
Serial.println();
Serial.print(ds[2]);
Serial.println();
Serial.print(" - - - - "); //Invalid value Numerical display - - - -
}
Serial.println(); //new line
delay(20); // After a single measurement is completed,
// add a 30mS delay before the next measurement.
// To prevent the aftermath of the last measurement
// when measuring at close range, resulting in inaccurate measurement.
delay(100); // Delay 200mS to measure again, delay is not necessary
}
*
*
//----------- UART (TX RX) R5 = 10K ---------------
/*
module: RCWL-9300A 16MM Split Type Open Type Ultrasonic Ranging Module
Version: V2.0
date: 20220710
Master chip: RCWL-9300A
Function: RCWL-9300A ultrasonic distance measuring module distance measurement and serial port display in UART mode
Notice: Need to set the module in UART mode (R5 = 10K)
test board: RCWL-3310
write: Wuxi Richen IoT Technology Co., Ltd.
Program customization: 13915288564
I2C data format: The IIC of RCWL-9300A outputs three 8BIT data, and the distance MM
value = 24-bit data is converted into decimal/10000.
connection :
-VCC = 3.3V/5.5V
-Trig_RX_SCL_I/O = A5
-Echo_TX_SDA = A4
-GND = GND
*/
#include "SoftwareSerial.h"
SoftwareSerial mySerial(A4, A5); // A4 is RX, A5 is TX; A4 is connected to module TX, A5 is connected to module RX
float Data_h = 0; // 16-23bit
float Data_m = 0; // 8-15bit
float Data_l = 0; // 0-7 bits
float distance = 0; // Distance data decimal value
void setup()
{
Serial.begin(9600); //Define serial port baud rate 9600 Factory default baud rate 9600
mySerial.begin(9600); //Define the analog serial port baud rate
Serial.println("RCWL-9300A-UART Ranging start:");
}
void loop()
{
Data_h = 0;
Data_m = 0;
Data_l = 0;
distance=0; //Initialize three 8BIT distance data and the distance value is 0
mySerial.flush(); //Clear analog serial port cache data
mySerial.write(0XA0); //Send the start ranging command 0XA0, 0XA0 is the start test command data
delay(150); //Measurement cycle delay, one cycle is 120mS, set 150MS, leave a margin
if (mySerial.available()>0) //Wait for 3 data to be received
{
Data_h= mySerial.read(); //read cached data
Data_m= mySerial.read();
Data_l= mySerial.read();
}
else
{
Data_h= 0; //The cache data cannot be read, and the data is cleared to 0
Data_m= 0;
Data_l= 0;
}
distance=(Data_h*65536+Data_m*256+Data_l)/10000; //Calculated as CM value
Serial.print("Distance:"); //Remove the "Distance:" and "CM" to draw on the serial port
if ((1<=distance)&&(900>=distance)) //Numerical display between 1CM-9M
{
Serial.print(distance);
Serial.print("CM"); //The serial port outputs the distance data, remove the "distance:" and "CM" to draw the serial port
}
else
{
Serial.println();
Serial.print(Data_h);
Serial.println();
Serial.print(Data_m);
Serial.println();
Serial.print(Data_l);
Serial.println();
Serial.print(" - - - - "); //Invalid value Numerical display - - - -
}
Serial.println(); //new line
delay(20); // After a single measurement is completed,
// add a 30mS delay before the next measurement.
// To prevent the aftermath of the last measurement
// when measuring at close range, resulting in inaccurate measurement.
delay(100); // Delay 200mS to measure again, delay is not necessary
}
*
*
เงื่อนไขอื่นๆ

วิธีการชำระเงิน
ชำระเงินผ่านธนาคาร
ชำระเงินด้วยการ Scan QR



ชำระเงินออนไลน์
- ค่าธรรมเนียม 3.9% + 11 THB
- การชำระผ่าน PayPal คุณไม่จำเป็นต้องแจ้งชำระเงิน เนื่องจากระบบจะจัดการให้คุณทันที ที่คุณชำระเงินเสร็จสมบูรณ์
MEMBER
Join เป็นสมาชิกร้านค้า


- พิมพ์ “mcucity” ในช่อง Search
- หรือเข้าจากรายการร้านค้าโปรดของฉัน
