
HC-SR04 (US-025) CS100 (3.3V-5V) Ultrasonic Distance Measuring Sensor Module

| รหัสสินค้า | M0042-50 |
| หมวดหมู่ | วัดระยะทาง และ ความเคลื่อนใหว |
| ราคา | 26.00 บาท |
| น้ำหนัก | 10 กรัม |
| ลงสินค้า | 23 ม.ค. 2563 |
| อัพเดทล่าสุด | 7 ส.ค. 2567 |

รายละเอียดสินค้า
-
HC-SR04 ,US-025 ที่ใช้ chip CS100 ต่างกันแค่ ชื่อเรียกเท่านั้น
US-025 VS US-026 ต่างกันที่ PCB ที่ใช้ประกอบเป็นโมดูล US-025 เป็น PCB 2 หน้า /US-026 เป็น PCB หน้าเดียว Single Side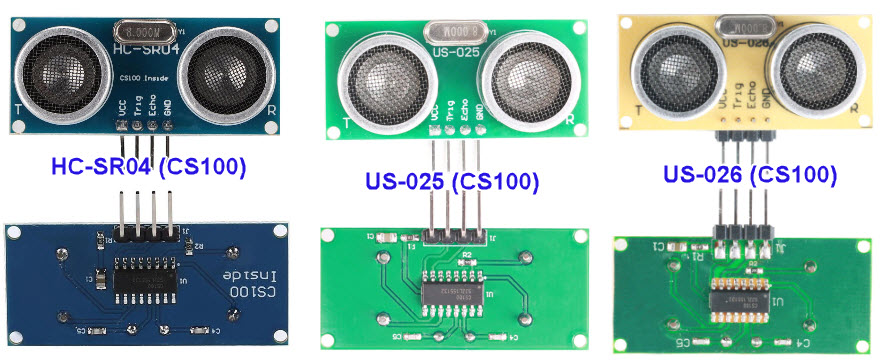
The new HC-SR04 has far better performance than the old HC-SR04 and US-015. In the case where the ranging accuracy is higher than that of the old HC-SR04 and US-015, the range is farther, up to 6 meters, far exceeding General ultrasonic ranging module.Using CS-100A ultrasonic ranging SOC chip, high performance, industrial grade, wide voltage, low price, cost breakdown bottom price, only half the price of ordinary ultrasonic ranging module, and performance far exceeds ordinary ultrasonic ranging module; it is the industry's first I dare to promise manufacturers who can return unconditionally for any reason.
- The new version of HC-SR04 has far more performance than the old version of HC-SR04 and US-015. In the case of higher ranging accuracy than the old versions of HC-SR04 and US-015, the ranging range is farther, up to 6 meters. Far more than the general ultrasonic ranging module.
- Adopt CS-100 ultrasonic ranging SOC chip, high performance, industrial grade, wide voltage, low price, and the performance far exceeds the ordinary ultrasonic ranging module.
- Data download link: https://pan.baidu.com/s/1sSah9PvLBrmbA7So-6YcSw Extraction code: qq35.
- HC-SR04 ultrasonic ranging module can realize non-contact ranging function of 2cm~6m, working voltage is 3V-5.5V, working current is 5.3mA, support GPIO communication mode, work is stable and reliable.
- The new HC-SR04 is the same size as the old HC-SR04, and the interface is fully compatible; but the distance measurement is longer, the accuracy is higher, the working voltage is wider, and it is industrial grade.
- The performance is the same as that of US-025 and US-026. Both adopt CS100 chip and the interface is fully compatible.
/* HC-SR04 Sensor https://www.dealextreme.com/p/hc-sr04-ultrasonic-sensor-distance-measuring-module-133696 This sketch reads a HC-SR04 ultrasonic rangefinder and returns the distance to the closest object in range. To do this, it sends a pulse to the sensor to initiate a reading, then listens for a pulse to return. The length of the returning pulse is proportional to the distance of the object from the sensor. The circuit: * VCC connection of the sensor attached to +5V * GND connection of the sensor attached to ground * TRIG connection of the sensor attached to digital pin 2 * ECHO connection of the sensor attached to digital pin 4 Original code for Ping))) example was created by David A. Mellis Adapted for HC-SR04 by Tautvidas Sipavicius This example code is in the public domain. */ long microsecondsToInches(long microseconds);
long microsecondsToCentimeters(long microseconds);
const int trigPin = 2; const int echoPin = 4; void setup() { // initialize serial communication: Serial.begin(9600); } void loop() { // establish variables for duration of the ping, // and the distance result in inches and centimeters: long duration, inches, cm; // The sensor is triggered by a HIGH pulse of 10 or more microseconds. // Give a short LOW pulse beforehand to ensure a clean HIGH pulse: pinMode(trigPin, OUTPUT); digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); // Read the signal from the sensor: a HIGH pulse whose // duration is the time (in microseconds) from the sending // of the ping to the reception of its echo off of an object. pinMode(echoPin, INPUT); duration = pulseIn(echoPin, HIGH); // convert the time into a distance inches = microsecondsToInches(duration); cm = microsecondsToCentimeters(duration); Serial.print(inches); Serial.print("in, "); Serial.print(cm); Serial.print("cm"); Serial.println(); delay(100); } long microsecondsToInches(long microseconds) { // According to Parallax's datasheet for the PING))), there are // 73.746 microseconds per inch (i.e. sound travels at 1130 feet per // second). This gives the distance travelled by the ping, outbound // and return, so we divide by 2 to get the distance of the obstacle. // See: http://www.parallax.com/dl/docs/prod/acc/28015-PING-v1.3.pdf return microseconds / 74 / 2; } long microsecondsToCentimeters(long microseconds) { // The speed of sound is 340 m/s or 29 microseconds per centimeter. // The ping travels out and back, so to find the distance of the // object we take half of the distance travelled. return microseconds / 29 / 2; }
Schematic HC-SR04/US-025/US-026 chip CS-100
เงื่อนไขอื่นๆ
วิธีการชำระเงิน
ชำระเงินผ่านธนาคาร
ชำระเงินด้วยการ Scan QR



ชำระเงินออนไลน์
- ค่าธรรมเนียม 3.9% + 11 THB
- การชำระผ่าน PayPal คุณไม่จำเป็นต้องแจ้งชำระเงิน เนื่องจากระบบจะจัดการให้คุณทันที ที่คุณชำระเงินเสร็จสมบูรณ์
MEMBER
Join เป็นสมาชิกร้านค้า


- พิมพ์ “mcucity” ในช่อง Search
- หรือเข้าจากรายการร้านค้าโปรดของฉัน
